OpenCV Laplace Operator
理论
在之前的教程中,我们学习了如何使用
Sobel算子。它是基于这样一个事实,即在边缘区域,像素强度显示了一个 “跳跃"或强度的高变化。得到强度的一阶导数,我们观察到边缘的特征是一个最大值,如图所示: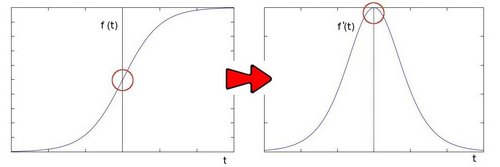
那么,如果我们取二阶导数会怎样?
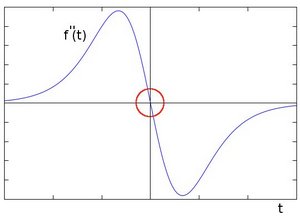 你可以观察到,边缘二阶导数是零! 因此,我们也可以用这个标准来尝试检测图像的边缘。然而,请注意,零值不仅会出现在边缘(它们实际上可以出现在其他无意义的位置);这可以通过在需要时使用过滤来解决。
你可以观察到,边缘二阶导数是零! 因此,我们也可以用这个标准来尝试检测图像的边缘。然而,请注意,零值不仅会出现在边缘(它们实际上可以出现在其他无意义的位置);这可以通过在需要时使用过滤来解决。
拉普拉斯算子
- 从上面的解释中,我们可以推断出,二阶导数可以用来检测边缘。由于图像是二维的,我们需要在两个维度上取导数。这里,拉普拉斯算子就派上用场了。 拉普拉斯算子的定义是: $$ Laplace(f) = \frac{\partial^2f}{\partial x^2}+\frac{\partial^2f}{\partial y^2} $$
- 拉普拉斯算子在OpenCV中是由函数
Laplacian()实现的。事实上,由于拉普拉斯算子使用图像的梯度,它在内部调用索贝尔算子来进行计算的。
Code
Explanation
变量声明
// Declare the variables we are going to use
Mat src, src_gray, dst;
int kernel_size = 3;
int scale = 1;
int delta = 0;
int ddepth = CV_16S;
const char* window_name = "Laplace Demo";
加载图像
const char* imageName = argc >=2 ? argv[1] : "./images/lena.jpg";
src = imread( samples::findFile( imageName ), IMREAD_COLOR ); // Load an image
// Check if image is loaded fine
if(src.empty()){
printf(" Error opening image\n");
printf(" Program Arguments: [image_name -- default lena.jpg] \n");
return -1;
}
消除噪声
// Reduce noise by blurring with a Gaussian filter ( kernel size = 3 )
GaussianBlur( src, src, Size(3, 3), 0, 0, BORDER_DEFAULT );
灰度化
cvtColor( src, src_gray, COLOR_BGR2GRAY ); // Convert the image to grayscale
拉普拉斯算子
Laplacian( src_gray, dst, ddepth, kernel_size, scale, delta, BORDER_DEFAULT );
- 参数如下。
src_gray:输入的图像。dst:目标图像ddepth。目的图像的深度。由于我们的输入是CV_8U,我们定义ddepth = CV_16S以避免溢出。kernel_size。内部应用的Sobel算子的核大小。在这个例子中我们使用3。scale, delta和BORDER_DEFAULT:我们把它们作为默认值。
将输出转换为CV_8U图像
// converting back to CV_8U
convertScaleAbs( dst, abs_dst );
结果
编译完上面的代码后,我们可以运行它,并将图像的路径作为参数。例如,以下图输入为例:

我们得到以下结果。注意到树木和牛的轮廓是如何被近似地定义的(除了在强度非常相似的区域,即牛头周围)。另外,请注意,树木后面的房子的屋顶(右侧)是不明显的标记。这是由于该区域的对比度较高。

References
https://docs.opencv.org/4.5.5/d5/db5/tutorial_laplace_operator.html